
Lọc sản phẩm
- Thương hiệu
Thương hiệu
OEMMakerbase - Loại
Loại
Máy CNC (14)Máy In 3D (25)Khác (1) - Tồn kho
Tồn kho
Hàng cònTất cả
Sản phẩm nổi bật

- Vinasemi 936H Tay Hàn Điều Chỉnh Nhiệt Độ Có LCD Hiển Thị Nhiệt 80W, 220VAC, 180~480℃
165.000 đ/Cái
Hàng còn: 515










Sản phẩm đã xem





A4988 Module Điều Khiển Động Cơ Bước Reprap 8~35VDC 2A
Thương hiệu
OEM
Mô tả
Arduino Reprap 3D printer, 8~35VDC, 2A
Hàng còn: 161 Cái
(Gửi hàng trong ngày)
0
Phản hồi
|
Số lượng mua
(Cái)
|
Đơn giá
(VND)
|
| 1+ |
19.000
|
| 20+ |
18.800
|
| 50+ |
18.600
|
Thông số
39 Sản phẩm tương tự| Thuộc tính | Giá trị | Tìm kiếm |
|---|---|---|
|
Loại |
Máy In 3D, Máy CNC |
|
| RoHS |
|
|
| 39 Sản phẩm tương tự | ||
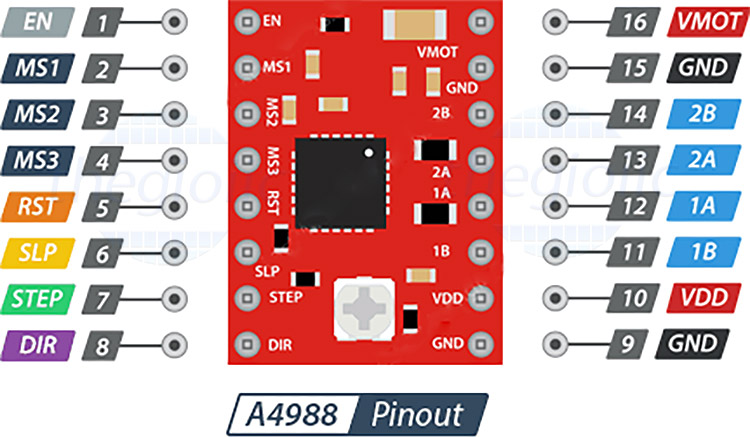
Mô tả sản phẩm
A4988 là bộ chuyển đổi và bảo vệ quá dòng, điều khiển động cơ bước chế độ DMOS, board hỗ trợ điều khiển ở chế độ full, 1/2, 1/4, 1/8, 1/16 bước mô tơ bước lưỡng cực.
Thông số kỹ thuật:
- Thích hợp điều khiển động cơ bước 8V~35V 2A;
- Giao tiếp và điều khiển đơn giản;
- Chế độ điều khiển: full, half, 1/4, 1/8 và 1/16;
- Điều chỉnh biến trở để thay đổi dòng ngõ ra max, tốc độ bước cao hơn;
- Tự động dò cường độ dòng điện;
- Có mạch shutdown khi quá nhiệt, quá áp và quá dòng;
- Mạch bảo vệ ngắn mạch.
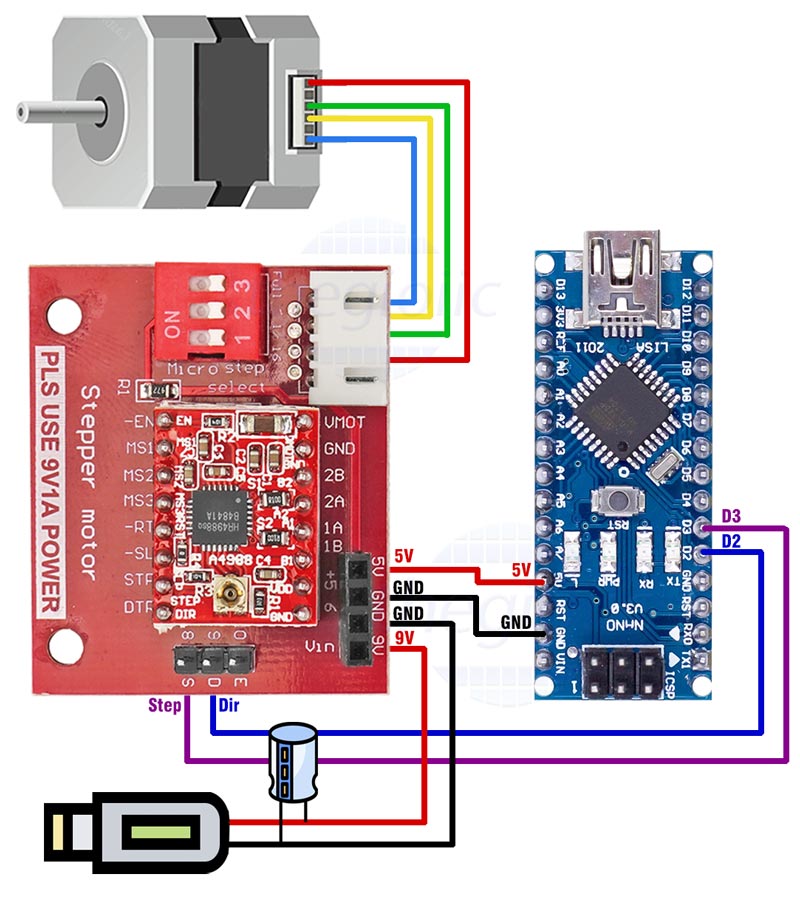
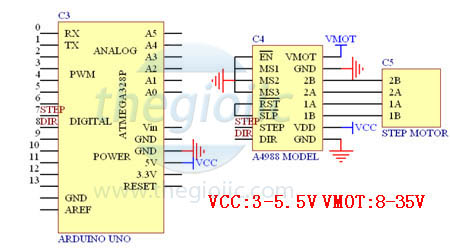
Với Arduino làm ví dụ, UNO kết hợp A4988 điều khiển STEP và DIR.
Mức điện áp logic VDD và GND lấy nguồn Arduino +5V, nguồn giữa motor và VMOT và GND ta cần 8-15 VDC; chế độ lựa chọn MS1, MS2 , MS3 tất cả là chế độ điều khiển full (quay khoảng 200 vòng hoặc bước 1.8°), nếu cần độ chính xác cao hơn, ta có thể chọn chế độ khác, vd nếu chọn chế độ 1/4 bước thì độ cần motor 800 vòng để hoàn thành. Lựa chọn 1 trong 3 chế độ MS1, MS2, MS3.
| MS1 | MS2 | MS3 | Microstep Resolution |
| Thấp | Thấp | Thấp | Full step |
| Cao | Thấp | Thấp | 1/2 step |
| Thấp | Cao | Thấp | 1/4 step |
| Cao | Cao | Thấp | 1/8 step |
| Cao | Cao | Cao | 1/16 step |
Code tham khảo
// Define pin connections & motor's steps per revolution #define CCW HIGH #define CW LOW const int dirPin = 2; const int stepPin = 3; const int stepsPerRevolution = 200; void setup() { // Declare pins as Outputs pinMode(stepPin, OUTPUT); pinMode(dirPin, OUTPUT); } void loop() { // Set motor direction clockwise digitalWrite(dirPin, CCW); // Spin motor slowly for(int x = 0; x < stepsPerRevolution; x++) { digitalWrite(stepPin, HIGH); delayMicroseconds(1000); digitalWrite(stepPin, LOW); delayMicroseconds(1000); } delay(1000); // Wait a second // Set motor direction counterclockwise digitalWrite(dirPin, CW); // Spin motor quickly for(int x = 0; x < stepsPerRevolution; x++) { digitalWrite(stepPin, HIGH); delayMicroseconds(1000); digitalWrite(stepPin, LOW); delayMicroseconds(1000); } delay(1000); // Wait a second }
Video
Sản phẩm liên quan







Kết nối với chúng tôi
Chấp nhận thanh toán






Phản hồi (0)