- Diễn đàn
- Thiết kế mạch Phần cứng
-
ĐẶC TẢ CÁC MODULE PHẦN CỨNG
ĐẶC TẢ CÁC MODULE PHẦN CỨNG
13/03/2012
0
6237
1. Giao diện kết nối
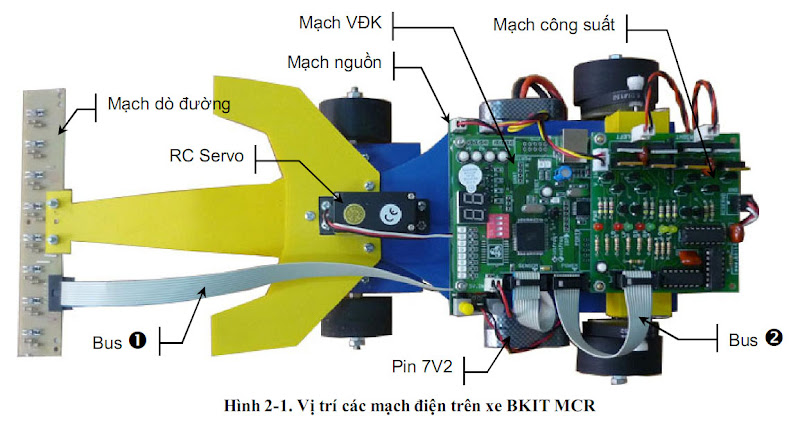
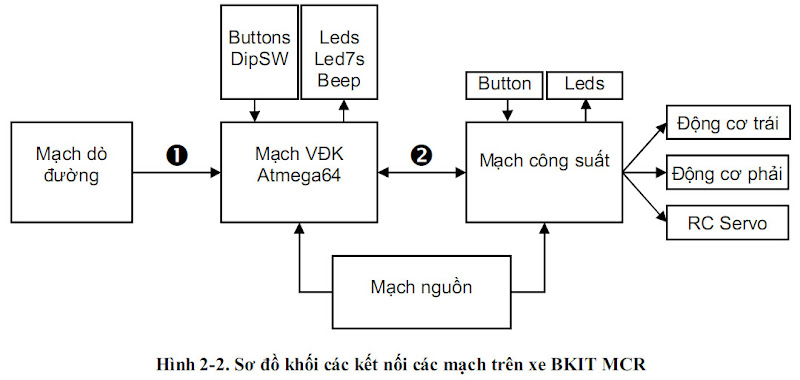
Xe BKIT MCR bao gồm Mạch Vi Điều Khiển (VĐK), Mạch Dò Đường, Mạch Công
Suất, Mạch Nguồn kết hợp với nhau để điều khiển sự di chuyển của xe, tức là
điều khiển hệ thống động cơ trái, phải và động cơ lái rc servo.
2.1. Mạch ổn áp đầu ra cố định 5V
Có rất nhiều IC có thể tạo điện áp ngõ ra là 5V với điện áp vào là 7.2V như
7805, LM317, LM2672, LM2674, LM2576. Do nguồn 5V tạo ra dùng để cung cấp
cho mạch VĐK, trong đó mạch VĐK còn cung cấp nguồn cho Mạch Dò Đường và
các IC trên Mạch Công Suất vì thế phải dùng IC ổn áp có dòng cung cấp lớn để
tránh mạch Vi xử lý bị reset do dòng không đủ lớn.Và IC LM2576 là một trong
những IC đáp ứng được các yêu cầu kỹ thuật trên (dòng cấp tối đa là 3A).

LM2576 gồm một họ IC có thể tạo điện áp ngõ ra cố định với 3.3V, 5V, 12V,
15V và điện áp điều chỉnh được. LM2576 có những đặc điểm tối ưu như: điện
áp vào mở rộng đến 40V, dòng ra tải tương đối lớn (có thể tối đa là 3A).
Dưới đây là sơ đồ mạch ứng dụng IC LM2576 tạo điện áp đầu ra 5V.
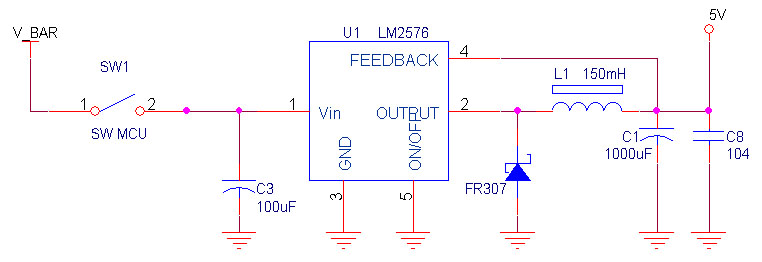
Hình 2 4. Sơ đồ nguyên lý mạch ổn áp 5V
2.2. Mạch ổn áp đầu ra 6V
Việc tạo ra điện thế 6V là để cung cấp cho hoạt động của RC Servo.
Dùng LM2576-ADJ là một IC nằm trong họ LM2576, có thể tạo điên áp
ngõ ra từ 1.23V đến 37V.
Việc điều chỉnh điện áp ra bằng 6V bằng cách điều chỉnh biến trở R6.
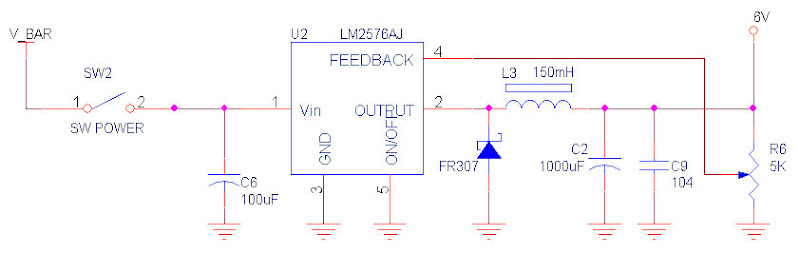
Hình 2 5. Sơ đồ nguyên lý mạch ổn áp 6V
2.3. Mạch Nguồn trên xe BKIT MCR

3. Xử lý tín hiệu Mạch Dò Đường
3.1. Nguyên lý hoạt động
Mạch dò đường có 8 bộ sensor nhạy màu. Mỗi bộ sensor gồm có một led phát
tia hồng ngoại và một led thu tia hồng ngoại, kết nối theo sơ đồ nguyên lý sau:
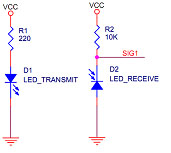
Hình 2-7. Sơ đồ nguyên lý Sensor hồng ngoại
Led phát sẽ phát tia hồng ngoại hướng về phía mặt phẳng đường đua, đường
đua sẽ phản xạ tia này lại led nhận. Tùy vào màu sắc đường đua tối hay sáng
mà cường độ tia hồng ngoại phản xạ lại ít hay nhiều.
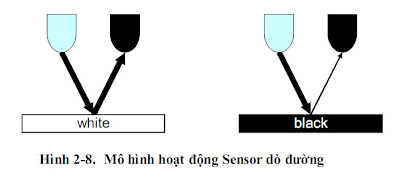
Led thu hồng ngoại hoạt động như một biến trở (điện trở có giá trị thay
đổi). Giá trị điện trở của led thu phụ thuộc vào cường độ tia hồng ngoại nó
nhận được.
Có thể tóm tắt bằng bảng sau:

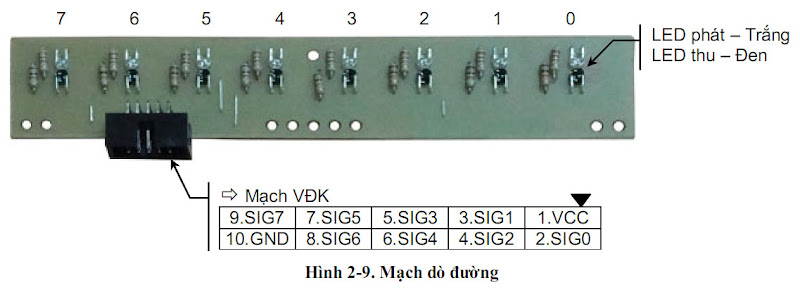
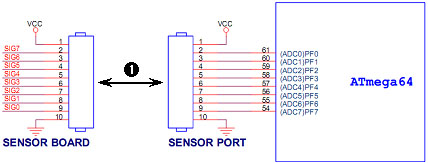
Vi điều khiển sẽ sử dụng chức năng ADC để đọc giá trị điện thế từ 8 đường
tín hiệu (SIG0 -> SIG7) do Mạch Dò Đường cung cấp, và từ các giá trị đọc
được này ta sẽ lập trình tính toán để biết được trong 8 bộ sensor, bộ nào
đang trong line trắng, bộ nào ở vùng đen của đường đua.
Dùng bus (1) (dài) kết nối với cổng PORT SENSOR trên Mạch VĐK.
3.2. Lập trình đọc ADC trên ATmega64
Như đã nói ở trên, để xử lý tín hiệu nhận được từ Mạch Dò Đường ta sẽ
dùng chức năng ADC của VĐK ATmega64. ADC (Analog-to-digital converter),
tức là chuyển tín hiệu Tương tự Analog thành tín hiệu Số Digital. Cụ thể hơn
trong lập trình cho Mạch Dò Đường, ta sử dụng chức năng ADC của ATmega64
để chuyển điện thế nhận được từ các đường tín hiệu SIG0 -> SIG7 thành giá
trị số phục vụ cho việc lập trình tính toán. Giá trị điện thế từ 0V -> 5V sẽ
được chuyển đổi tương ứng với giá trị từ 0 -> 255.
Hình 2 10. Kết nối ADC trên ATmega64
Trong chương trình BKIT MCR 2010, các hàm về ADC được viết trong
module adc (thư mục adc gồm file adc.c và adc.h). Một số hàm xử lý chính:
- void adc_init();
Hàm cài đặt các thông số hoạt động cho chức năng ADC của ATmega64.
Hàm này chỉ gọi một lần ở đầu chương trình.
- unsigned char read_adc(unsigned char adc_input);
Hàm này sẽ thực hiện việc đọc giá trị ở một kênh ADC. Các tham số:
adc_input: giá trị từ 0 -> 7, là số thứ tự kênh ADC muốn đọc, tương ứng với
SIG0 -> SIG7 của Mạch Dò Đường.
Kết quả trả về của hàm này có giá trị từ 0 -> 255, chính là giá trị của một
kênh ADC sau khi chuyển đổi.
- void update_vcompare();
Hàm này sẽ thực hiện việc tính toán và cập nhật giá trị cho mảng giá trị
v_compare.
unsigned char v_compare[8] ;
Mảng v_compare chứa 8 giá trị tương ứng với 8 bộ sensor dò đường, đó là
các giá trị được tính toán sao cho khi một sensor ở vùng đen sẽ có giá trị
ADC lớn hơn v_compare của nó và ngược lại, khi ở line trắng sẽ có giá trị ADC
nhỏ hơn. Nói cách khác giá trị v_compare là giá trị ADC trung gian giữa giá trị
ADC lúc sensor nhận màu đen và trắng.
- void read_sensor();
Hàm này thực hiện việc định kỳ mỗi 1ms một lần, cập nhật giá trị từ Mạch Dò
Đường và đưa kết quả vào biến sensor.
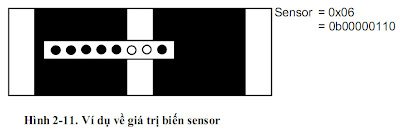
unsigned char sensor;
Biến sensor có 8 bit, mỗi bit sẽ lưu lại trạng thái của một bộ sensor của Mạch
Dò Đường. Bit bằng 1 tức sensor nằm trong line trắng, bit bằng 0 tức sensor
nằm trong vùng đen.
4. Điều khiển các module trên Mạch VĐK
4.1. Mô tả chung
Mạch điều khiển xe BKIT MCR sử dụng vi điều khiền AVR ATmega64 của hãng
Atmel. Đây là một dòng vi điều khiền khá phổ biến hiện nay cả trong học tập
nghiên cứu cũng như trong ứng dụng thực tế.
Để dễ dàng hơn trong việc sử dụng lập trình điều khiển xe BKIT MCR, mạch được
thiết kế tích hợp (onboard) một số khối (module) I/O như: 8 led đơn, 2 led 7
đoạn, loa beep, 4 nút nhấn, dipsw4, nạp onboard, … (Hình 2-10).
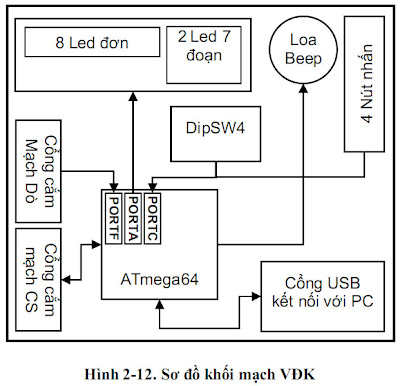
Chi tiết về thiết kế và cách điều khiển các khối trên mạch VĐK được trình bày
dưới đây.
4.2. Khối Led
- Điều khiển một led đơn
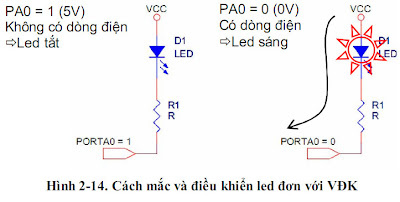
Led (điốt phát quang) thường dùng trên các mạch điện tử để hiển thị thông
tin, với 2 trạng thái tắt/sáng. Led thường được mắc nối tiếp với một điện trở
(có giá trị khoảng từ 100Ohm đến 2kOhm) để hạn dòng (tránh làm hỏng led),
thành một đoạn mạch AB nối tiếp. Khi đó để làm led sáng, ta đặt điện thế
+5V vào đầu A và điện thế 0V vào đầu B còn lại. Xem Hình.
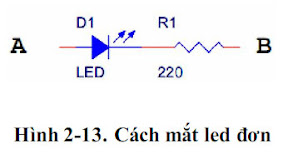
Để điều khiển led bằng VĐK ta cũng áp dụng tương tự. Đầu A ta nối vào VCC
(+5V), đầu B nối vào chân VĐK, ví dụ trong hình là nối vào chân PA0 (chân 0
của PORTA) của vi điều khiển ATmega64. Khi PA0 = 1 (5V), led tắt. Và khi
PA0 = 0 (0V) led sáng.
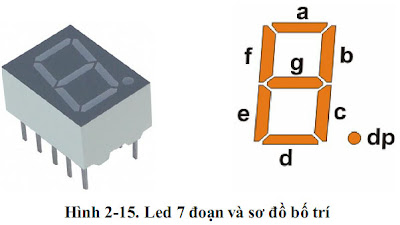
- Điều khiển led 7 đoạn
Mỗi led 7 đoạn gồm 8 led đơn ký hiệu là a, b, c, d, e, f, g, dp được sắp xếp ở
các vị trí như hình sau:
Led 7 đoạn có nhiều hình dạng, kích thước, màu sắc, sơ đồ vị trí chân khác
nhau, nhưng xét về nguyên lý thì có thể chia thành 2 loại: cực dương chung
và cực âm chung.
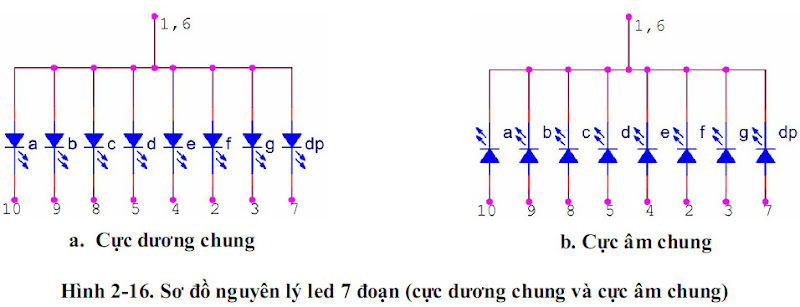
Việc điều khiển led 7 đoạn là điểu khiển 8 led đơn, trong 8 led đó ta quyết định
cho sáng led nào tắt led nào để được sự hiển thị như ta mong muốn. Ví dụ để
hiển thị số 3, ta cho sáng led a, b, c, d, g và tắt các led còn lại.
Led 7 đoạn được dùng trên mạch BKIT MCR là loại cực dương chung.
- Ứng dụng transistor làm khóa điện tử
Để dễ dàng hơn trong quá trình điều khiển khối led trên Mach VĐK, ta sẽ tìm
hiểu thêm về khóa điện tử. Khóa điện tử (còn gọi là công-tắc số) là một
công-tắc được điều khiển bằng điện, dùng để đóng/ngắt cho một kết nối nào
đó trong một hệ thống mạch.
Transistor là một linh kiện điện tử phổ biến, thường được sử dụng như một
thiết bị khuếch đại hoặc một khóa điện tử. Xét về cấu tạo, transistor có hai
loại là NPN và PNP. Ở đây, ta sẽ không đề cập đến cấu tạo, nguyên lý hoạt
động của transistor mà chỉ xét mạch ứng dụng transistor làm một khóa điện
tử. Có hai dạng sau:
+ Sử dụng transistor PNP làm khóa nối nguồn VCC.
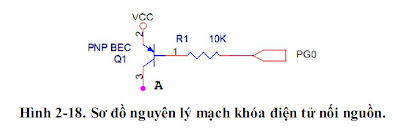
Khóa được điều khiển bởi một chân của VĐK, ví dụ ở đây là chân PG0. Khi
PG0=0, khóa đóng (ON), lúc đó đầu A xem như được nối với VCC. Ngược lại
khi PG0=1, khóa ngắt (OFF), lúc đó A được cách li với VCC.
+ Sử dụng transistor NPN làm khóa nối đất GND.
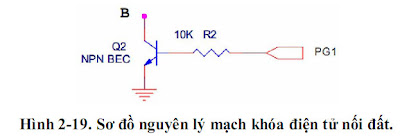
Tương tự, ví dụ ở đây khóa được điều khiển bở chân PG1. Ngược lại với khóa
nối nguồn, khi PG1=1, khóa đóng (ON), lúc đó đầu B xem như được nối với
GND. Ngược lại khi PG1=0, khóa ngắt (OFF), lúc đó B được cách li với GND.
- Điều khiển khối led trên mạch VĐK.
Khối led gồm có 2 led 7 đoạn và 8 led đơn được kết nối như hình bên dưới.
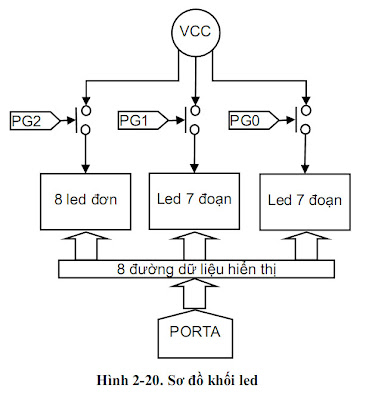
Có thể hình dung việc điều khiển led này là điều khiển 3 bộ led, mỗi bộ có 8
led đơn (led 7 đoạn thực chất là 8 led đơn ghép lại). Các đường dữ liệu hiển
thị của các bộ led được nối chung với nhau và được điều khiển bởi PORTA.
Các chân PG0, PG1, PG2 làm nhiệm vụ đóng ngắt công-tắc, quyết định cho
hay không cho bộ led nào hiển thị.
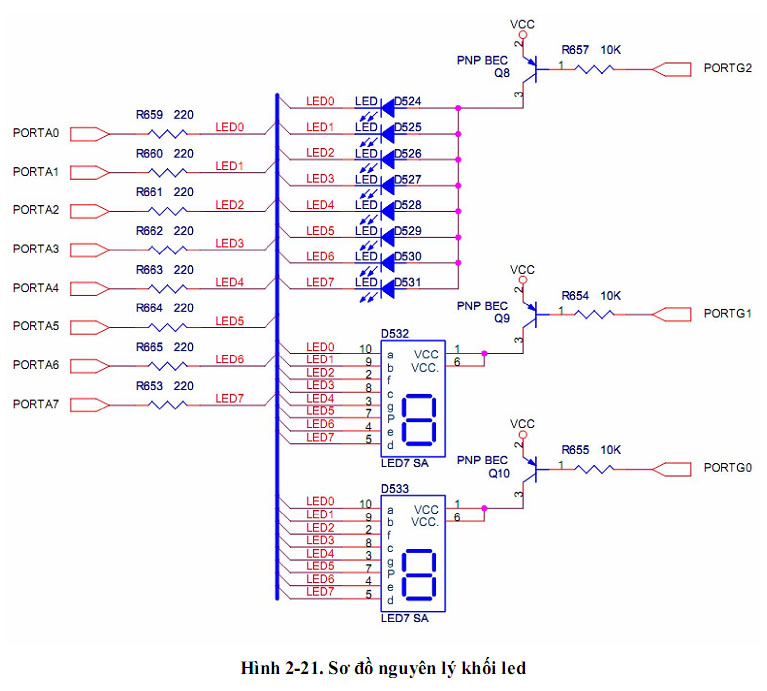
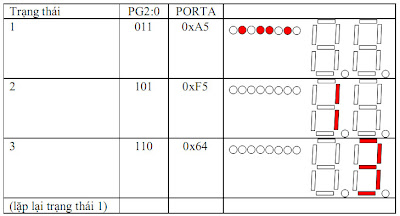
Ví dụ: để hiện số 3 ở led 7 đoạn thứ nhất ta cài đặt các chân VĐK như sau:
PG2 = 1: tắt bộ led đơn
PG1 = 0: mở led 7 đoạn thứ nhất
PG0 = 1: tắt led 7 đoạn thứ hai
PORTA = 0x64 (số hex): tức là 0b01100100 (số nhị phân) tương ứng với việc
tắt mở các led d,e,dp,g,c,f,b,a
Trong thiết kế, việc nối chung 8 đường dữ liệu hiển thị của 3 bộ led vào PORTA như thế nhằm mục đích tiết kiệm chân I/O của VĐK.
Trong việc điều khiển, nếu dùng cách điều khiển tĩnh như trên thì chúng ta chỉ
hiển thị dữ liệu trên một bộ led, hoặc chỉ hiển thị được dữ liệu giống nhau
trên các bộ led. Vậy giả sử muốn hiện số 13 trên hai led 7 đoạn (mỗi led hiện
một chữ số) thì phải làm sao? Một cách hay dùng để giải quyết vấn đề này
gọi là Phương pháp quét led. Đó là, chia việc hiển thị led thành nhiều thời
đoạn, mỗi thời đoạn hiển thị một dữ liệu trên một bộ led, và khi thời đoạn
được chia đủ nhỏ, hiệu ứng 24hình/giây được tạo ra và mắt ta sẽ nhìn thấy
như thể là dữ liệu khác nhau hiển thị đồng thời trên các bộ led. Có mô tả
bằng bảng sau:
- Các hàm chính xử lý xuất led trong chương trình
Tất cả các hàm xử lý việc hiển thị led được viết trong module led (tham khảo
thư mục led gồm file led.c và led.h). Một số hàm chính:
void led_init();
Hàm cài đặt chế độ hoạt động các chân I/O của VĐK trong việc xuất led. Hàm
này chỉ gọi một lần ở đầu chương trình.
void led_mod();
Hàm quét led, hàm được gọi bởi ngắt timer định kỳ mỗi một ms một lần. Ở mỗi
lần được gọi, hàm sẽ chuyển trạng thái hiển thị led 1->2, 2->3, hoặc 3->1
(Bảng 2-1).
void led_put(unsigned char _val);
Hàm xuất giá trị ra 8 led đơn.
void led7_putHex(unsigned char _val);
Hàm xuất giá trị ra 2 led 7 đoạn.
4.3. Khối Loa Beep
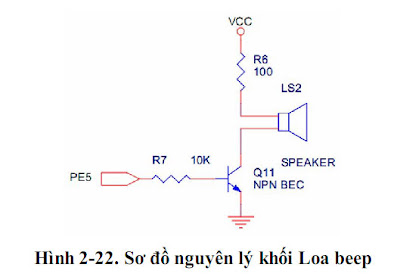
Khối Loa beep tắt/mở bằng một khóa điện tử và được điều khiển bởi chân PE5
của ATmega64.
Khi PE5=1: ON, loa phát ra tiếng kêu.
Khi PE5=0: OFF, loa không phát ra tiếng kêu.
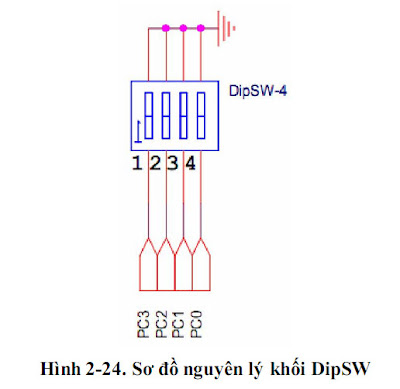
4.4.Khối DipSwitch

DipSW gồm nhiều công-tắc hoạt động độc lập nhưng được gắn chung với
nhau thành một thanh. Có nhiều loại DipSW, khác biệt lớn nhất giữa chúng
là số lượng công-tắc. Trong Mạch VĐK dùng DipSW-4, tức là DipSW có 4
công tắc.
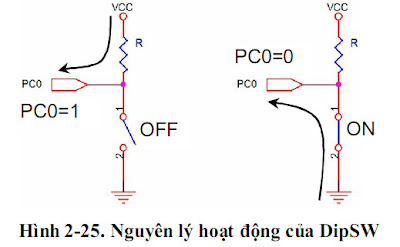
Về nguyên lý thì rất đơn giản, khi gạt một công-tắc lên ON thì hai chân tương
ứng ở hai phía công-tắc đó sẽ nối nhau.
Trên Mạch VĐK, DipSW được ứng dụng trên mạch BKIT MCR để cài đặt mode
cho xe chạy. Với DipSW-4 ta chọn được 16 mode tứ mode 0 đến mode 15
(0b0000 -> 0b1111).
Khi lập trình các chân PC3:0 ta sẽ cài đặt ở chế độ input và được kéo lên. Khi
công-tắc hở (OFF) ta sẽ nhận được mức 1, và khi công-tắc đóng (ON) ta
nhận được mức 0. Khi một chân VĐK cài đặt ở chế độ kéo lên (pull-up), có
thể hình dung là bên trong VĐK có một điện trở nối chân đó của VĐK lên VCC.
4.5. Khối Nút nhấn
Mỗi nút nhấn có hai chân, nguyên lý hoạt động rất đơn giản, khi không nhấn
nút (OFF) thì hai chân của nút không nối nhau, và ngược lại khi nhấn nút
(ON), hai chân của nút sẽ nối nhau.
Trên Mạch VĐK có 4 nút nhấn được kết nối theo sơ đồ sau:
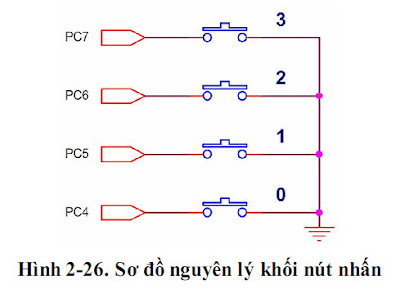
Tương tự như việc lập trình DipSW, các chân PC7:4 ta sẽ cài đặt ở chế độ input và được kéo lên. Khi nút không nhấn (OFF) ta sẽ nhận được mức 1, và khi nút được nhấn (ON) ta nhận được mức 0.
- Chống rung phím nhấn
+ Vấn đề rung, nhiễu khi nhấn nút.
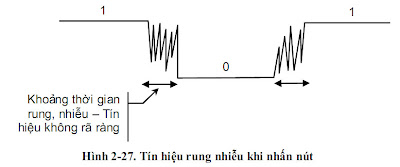
Khi không nhấn nút tín hiệu ở mức cao, khi nhấn nút tín hiệu xuống mức thấp.
Trong khoảng thời gian tín hiệu chuyển từ mức cao xuống mức thấp sẽ xảy
ra tình trạng rung, nhiễu làm cho tín hiệu không rõ ràng. Mặc dù khoảng thời
gian rung, nhiễu là rất nhỏ, chưa tới 1ms (phụ thuộc vào cách nhấn nút và
chất lượng nút nhấn), nhưng với tốc độ xử lý rất cao của VĐK thì đây là một
vấn đề cần phải giải quyết.
+ Giải pháp chống rung
Có hai giải pháp thường được đưa ra để lựa chọn là giải pháp phần cứng (thực
hiện trong giai đoạn thiết kế mạch), và giải pháp phần mềm (lúc lập trình). Ở
đây hướng dẫn các bạn một giải thuật chống rung nút bằng phần mềm.
Nội dung: định kỳ cứ sau một khoảng thời gian cố định (1ms) bạn đọc giá trị
nút nhấn một lần, so sánh giá trị 3 lần đọc liên tiếp, nếu chúng bằng nhau thì
nhận giá trị đó coi như nút nhấn không ở trong trạng thái rung.
Ví dụ: hàm sau được thực hiện mỗi 1ms một lần để lấy giá trị nút nhấn từ
PORTC lưu vào biến key_input, các biến key0, key1, key2 để lưu 3 giá trị
nút nhấn ở 3 trạng thái liên tiếp nhau:
Code:
void update_key(){
key2 = key1;
key1 = key0;
key0 = PINC;
if ((key0 == key1) && (key1 == key2)){
key_input = key0;
}
}
- Các hàm điều khiển DipSW và nút nhấn:
Các hàm được viết trong module input (tham khảo thư mục input gồm file
input.h và input.c).
void input_init();
Hàm khởi tạo các I/O cho việc nhận input. Hàm này được gọi một lần ở đầu
chương trình.
void update_input();
Hàm đọc giá trị các input, xử lý rung, nhiễu và đưa giá trị vào các biến
key_input, dipsw_input,… Hàm này được gọi định thời bởi ngắt timer.
unsigned char get_key(unsigned char _key_id);
Hàm kiểm tra xem nút nhấn có thứ tự _key_id có được nhấn không. Nếu nút
được nhấn hàm trả về 1, ngược lại trả về 0. Tham số _key_id nhận một trong
các giá trị KEY0, KEY1, KEY2, KEY3 tương ứng với các nút 0,1,2,3 trên Mạch
VĐK.
unsigned char get_dipsw();
Hàm lấy giá trị DipSW, kết quả trả về từ 0 đến 15 tương ứng với giá trị cài đặt
trên DipSW.
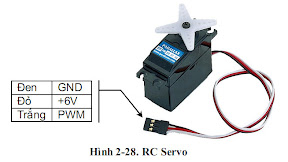
5. Điều khiển RC Servo
RC Servo là hệ thống gồm động cơ DC, hộp số, và vi mạch điều khiển. Tùy theo
tín hiệu điều khiển mà nó nhận được, RC Servo sẽ quay trục đến một góc xác
định trong khoảng từ 00 đến 1800.
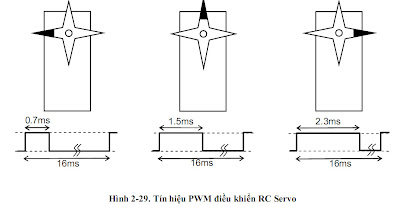
Điều khiển RC Servo chính là đưa tín hiện vào dây PWM để RC Servo quay theo
góc mà mình mong muốn. Tín hiệu PWM cho RC Servo có chu kỳ 16ms, độ rộng
xung từ 0.7ms đến 2.3ms, mô tả theo hình bên dưới:
- Các hàm điều khiển RC Servo:
Các hàm viết trong module handle (tham khảo thư mục handle gồm file
handle.h và file handle.c).
void handle_init();
Hàm khởi tạo chế độ điều khiển RC Servo, được gọi một lần ở đầu chương trình.
void handle(int _angle);
Hàm cài đặt góc quay cho RC Servo.Tham số _angle là góc quay cần cài đặt
cho RC Servo, tham số này có giá trị từ -90 đến 90, tương ứng với góc quay
từ -900 đến 900 của đầu xe. Khi gọi handle(0) thì đầu xe ở vị trí giữa.
6. Mạch Công Suất và nguyên lý điều khiển động cơ điện một chiều
6.1. Nguyên lý điều khiển động cơ một chiều
Động cơ điện một chiều (hay động cơ DC) là động cơ hoạt động với dòng điện
một chiều.

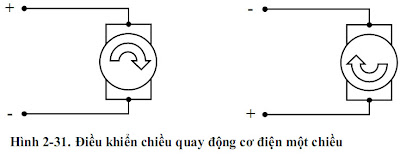
- Điều khiển chiều của động cơ điện một chiều
Khi ta cấp điện thế dương (+) vào một cực của động cơ và cấp điện thế âm
(-) vào cực còn lại thì động cơ sẽ quay theo một chiều cố định. Và khi ta
cấp điện thế ngược lại, đảo chiều dương âm thì động cơ sẽ quay theo chiều
ngược lai.
- Điều khiển tốc độ động cơ điện một chiều
Để điều khiển tốc độ động cơ điện một chiều ta dùng phương pháp điều xung
(PWM). Như trên ta đã biết, khi được cấp điện thì động cơ quay, và khi
không cấp điện nữa thì động cơ ngừng hoạt động. Trong một khoảng thời
gian rất ngắn 128us (gọi là chu kỳ điều xung T), và chia khoảng thời gian này
thành 2 phần, ta sẽ cấp điện cho động cơ một phần thời gian đầu, và ngừng
cấp điện ở phần thời gian sau. Lặp lại chu kỳ đó liên tục, như thế động cơ sẽ
liên tục ở trạng thái quay-ngừng-quay-ngừng-quay… Vì chu kỳ điều xung là
rất nhỏ nên ta sẽ thấy động cơ quay liên tục. Tốc độ của động cơ phụ thuộc
và tỷ lệ thời gian động cơ được cấp điện trong một chu kỳ.
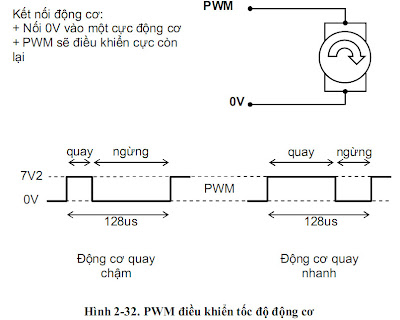
Trong một chu kỳ, tỷ lệ thời gian động cơ được cấp điện càng nhiều thì động cơ quay càng nhanh.
- Các hàm điều khiển động cơ
Các hàm cài đặt và điều khiển động cơ viết trong module speed (tham khảo
thư mục speed gồm file speed.h và speed.c).
void speed_init();
Hàm khởi tạo chức năng PWM của ATmega64 để điều khiển động cơ, hàm được gọi một lần ở đầu chương trình.
void speed(int _left_speed, int _right_speed);
Hàm cài đặt tốc độ và chiều cho hai động cơ bánh xe. Các tham số:
_left_speed: có độ lớn từ 0 đến 255 tương ứng với tốc tộ từ 0% đến 100% của động cơ trái. Có dấu dương (+) nếu chạy TIẾN và âm (-) nếu chạy LÙI.
_right_speed: tương tự, đây là tham số điều khiển tốc độ và chiều cho động cơ phải.
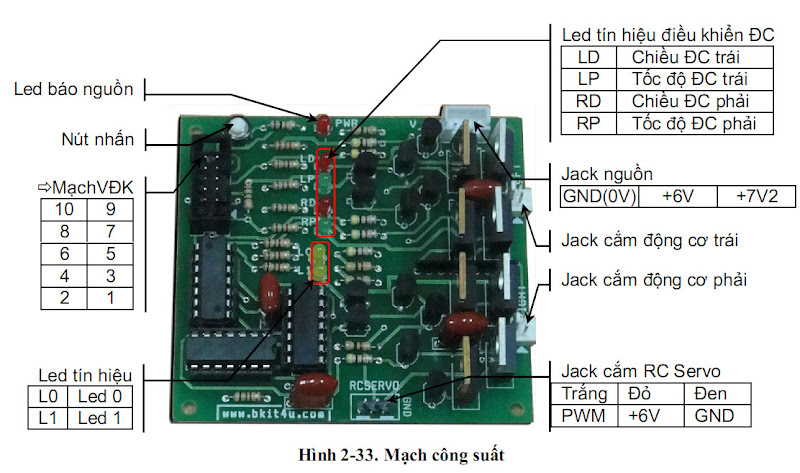
6.2. Mạch Công Suất
Như đã nói ở trên, Mạch Công Suất có nhiệm vụ khuếch đại tín hiệu đầu vào
điện với điện thế thấp từ VĐK thành tín hiệu điều khiển đầu ra với điện thế
cao để điều khiển động cơ.
Các thành phần trên mạch được mô tả trong hình sau:
Jack kết nối Mạch Công Suất với Mạch VĐK gồm 10 chân, mô tả chi tiết trong
bảng sau:
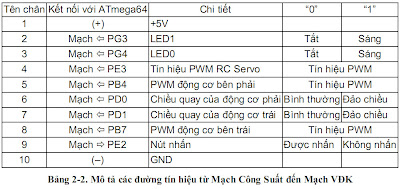
*** Ghi chú:
+ Kí hiệu “Mạch -> PE2” nghĩa là đọc tín hiệu từ Mạch Công Suất đến VĐK.
+ Kí hiệu “Mạch <- PB7” nghĩa là xuất tín hiệu từ VĐK đến Mạch Công Suất
Nguồn: bkit4u.com
Các tin khác
- Giới thiệu về đèn năng lượng mặt trời
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- Giới thiệu về đèn năng lượng mặt trời
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- ĐÈN LED NHÀ XƯỞNG
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- Giới thiệu về đèn năng lượng mặt trời
- ĐẠI LÝ PHÂN PHỐI ĐÈN NLMT - Giá Sỉ
- Giới thiệu về đèn năng lượng mặt trời
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- Giới thiệu về đèn năng lượng mặt trời
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- Giới thiệu về đèn năng lượng mặt trời
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- ĐÈN LED NHÀ XƯỞNG
- ĐẠI LÝ PHÂN PHỐI ĐÈN NLMT - Giá Sỉ
- Giới thiệu về đèn năng lượng mặt trời
- ĐÈN NĂNG LƯỢNG MẶT TRỜI
- Thi công điện nhà xưởng tại bình dương tháng 4
- Thi công điện nhà xưởng tại bình dương tháng 4

Phản hồi (0)