Ngừng kinh doanh





BTS7960 Module Điều Khiển Động Cơ DC 43A
Thương hiệu
OEM
Mô tả
Nguồn: 6-27VDC, dòng tải: 43A
Hết hàng
(Đặt mua để có hàng sớm)
0
Phản hồi
|
Số lượng mua
(Cái)
|
Đơn giá
(VND)
|
| 1+ | 76.000 |
| 20+ | 75.000 |
| 50+ | 74.000 |
![]() Giao hàng toàn quốc
Giao hàng toàn quốc
![]() Thanh toán khi nhận hàng
Thanh toán khi nhận hàng
![]() Cam kết đổi/trả hàng
Cam kết đổi/trả hàng
Thông số
29 Sản phẩm tương tự| Thuộc tính | Giá trị | Tìm kiếm |
|---|---|---|
|
Bộ xử lý chính |
BTS7960 |
|
|
Điện áp cấp |
12V, 24V |
|
|
Dòng điện |
40-49 A |
|
| 29 Sản phẩm tương tự | ||
Mô tả sản phẩm
BTS7960 là một mô-dun điều khiển động cơ DC, cầu H dòng cao tích hợp đầy đủ cho các ứng dụng truyền động động cơ cần sử dụng dòng cao.
Mạch này chứa một MOSFET bên cao kênh p và một MOSFET bên thấp kênh n, với một vi mạch trình điều khiển tích hợp trong một gói. Việc giao tiếp với vi điều khiển được thực hiện dễ dàng nhờ vi mạch điều khiển tích hợp có các đầu vào mức logic, bảo vệ chống quá nhiệt, quá áp, quá dòng và ngắn mạch...
Thông số kỹ thuật:
- Điện áp cung cấp: 6 ~ 27 VDC
- Dòng tải cao: 45A
- Tự động ngắt khi áp dưới 5.5V, và mở lại sau khi áp lớn hơn 5.5V
- Kích thước: 50x50mm
Lưu ý: Sản phẩm không được bảo hành. Quý khách vui lòng tham khảo Quy định bảo hành và Quy định đổi trả hàng
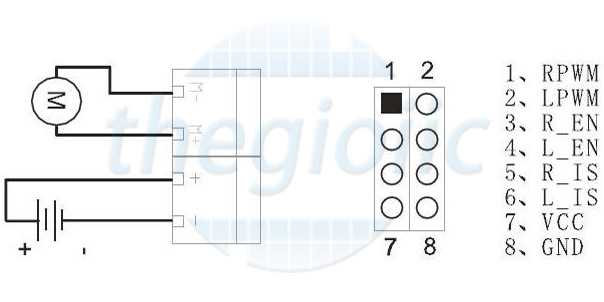
- RPWM: chân đảo chiều hoặc cấp PWM nửa cầu phải, Mức tích cực cao.
- LPWM: chân đảo chiều hoặc cấp PWM nửa cầu trái, Mức tích cực cao.
- R_EN: 0 Disable nửa cầu phải, 1 Enable nửa cầu phải.
- L_EN: 0 Disable nửa cầu trái, 1 Enable nửa cầu trái.
- R_IS: giới hạn dòng nửa cầu phải.
- R_IS: giới hạn dòng nửa cầu trái.
- VCC: 5VDC.
- GND.
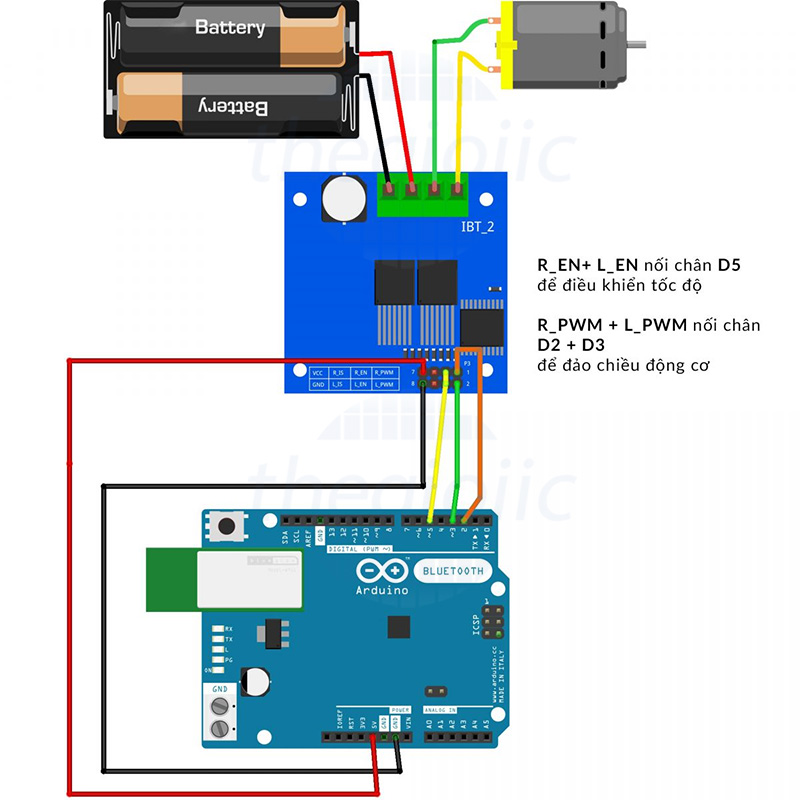
Code Mẫu
int RL_EN = 5; // băm xung int R_PWM = 2;// điều khiển chiều quay int L_PWM = 3;// điều khiển chiều quay void setup() { pinMode(RL_EN, OUTPUT); pinMode(R_PWM, OUTPUT); pinMode(L_PWM, OUTPUT); digitalWrite(R_PWM, HIGH); digitalWrite(L_PWM, HIGH); //STOP } void loop() { int i; digitalWrite(R_PWM, HIGH); digitalWrite(L_PWM, LOW); //clockwise for(i = 0; i <= 255; i= i+10) //Speed up { analogWrite(RL_EN, i); delay(500); } for(i = 255; i >= 0; i= i-10)//Speed down { analogWrite(RL_EN, i); delay(500); } delay(1500); //breaks digitalWrite(R_PWM, LOW); digitalWrite(L_PWM, HIGH); //counter-clockwise for(i = 0; i <= 255; i= i+10) //Speed up { analogWrite(RL_EN, i); delay(500); } for(i = 255; i >= 0; i= i-10) //Speed down { analogWrite(RL_EN, i); delay(500); } }