Gói hệ thống kết hợp giữa CAN transceiver và vi điều khiển
Chip LPC11C22 và LPC11C24 của NXP(1) là sự tích hợp của CAN(2) transceiver tốc độ cao và vi điều khiển có sẵn trình điều khiển CANopen(3) trên chip. Với giải pháp SiP(4), LPC11C22/C24 được tích hợp CAN transceiver(5) tốc độ cao TJF1051 và vi xử lý trên cùng một chip để cung cấp đầy đủ chức năng của giao thức CAN trên một gói LQFP48(6).
NXP cho biết giá bán CAN transceiver có thể bằng hoặc hơn vi điều khiển. Vì vậy, việc tích hợp CAN transceiver trên cùng một chip sẽ làm tăng tính linh động, chất lượng hệ thống, đồng thời làm giảm các kết nối điện bên ngoài. Điều này giúp giảm kích thước board trên 50% trong khi chi phí bù thêm chỉ dưới 20% so với giá vi điều khiển rời tương ứng.
Lớp vậy lý CAN được thiết kế dành cho các mạng CAN tốc độ cao lên đến 1Mbit/s và cung cấp hiệu suất tối ưu cho các ứng dụng công nghiệp cùng với chế độ bảo vệ phóng tĩnh điện(7) (ESD), tăng cường khả năng tương thích điện từ(8) (EMC) và xử lý công suất thấp.
Lớp vật lý CAN của LPC11C22/C24 hoàn toàn tương thích chuẩn ISO 11898-2 dành cho tín hiệu 2 dây cân bằng và được tối ưu cho các ứng dụng cảm biến tự động cũng như các mạng CAN trong môi trường công nghiệp khắc nghiệt. Khả năng xử lý phóng tĩnh điện trên các chân bus được tích hợp thêm các đặc điểm bảo vệ an toàn tự động như khả năng lái dòng DC cao, truyền dữ liệu time-out, bảo vệ thấp áp và bảo vệ nhiệt.
Quản lý công suất thấp cũng được tích hợp nên bộ transceiver có thể ngắt khỏi bus khi không được cấp nguồn.
Trình điều khiển CANopen được nạp sẵn trong ROM trên chip cùng với giao tiếp lập trình ứng dụng APIs(9). Đặc điểm này cho phép người dùng sử dụng đưa LPC11C22/C24 vào trong các “ứng dụng mạng nhúng” được xây dựng trên chuẩn CANopen.
Lớp chuẩn CANopen (EN 50325) phù hợp với các mạng nhúng dùng trong lĩnh vực điều khiển như máy móc, thang máy.
Trình điều khiển CANopen tích hợp sẵn sẽ giảm nhiều rủi ro và tạo điều kiện dễ dàng cho các kỹ sư thiết kế hệ thống, đồng thời giảm công suất xử lý và nạp khởi động dễ dàng thông qua CAN. Việc cập nhật flash thông qua ISP(10) trên bus CAN cung cấp khả năng lập trình các phần trống khác bằng cách thay đổi các thông số hệ thống, điều này cung cấp đầy đủ khả năng tái lập trình cho các vùng.
API cung cấp các phần sau:
- Cài đặt và khởi động CAN
- Gửi và nhận các thông điệp CAN
- Trạng thái CAN
- Từ điển đối tượng CANopen(11)
- Thông tin xúc tiến SDO
- Nguyên gốc thông tin gián đoạn SDO
- Xử lý fall-back SDO
Tập lệnh ARM Cortex-M0 v6-M được xây dựng dựa trên các lệnh Thumb(12) 16 bit, nghĩa là LPC11C22 /C24 yêu cầu một kích thước code nhỏ hơn từ 40 đến 50 % so với các vi xử lý 8/16 bit dành cho phần lớn các nhiệm vụ chung.
Chip LPC11C22 và LPC11C24 45 DMIPS thực hiện việc cung cấp chức năng xử lý thông điệp và dữ liệu cho các nút CAN khác nhau với giải pháp tối ưu năng lượng chưa có trong các vi xử lý 8/16 bit ngày nay.
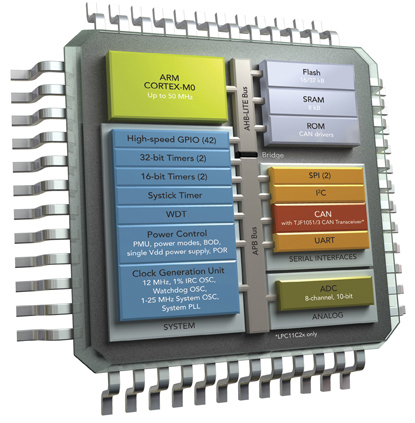
Chip LPC11C22 và LPC11C24 bao gồm các thành phần:
- Vi xử lý ARM Cortex-M0 50 MHz với SWD/debug (4 điểm ngắt)
- Bộ nhớ flash 32KB/16KB và 8KB SRAM
- 32 véc-tơ ngắt; 4 mức ưu tiên; Các ngắt chuyên dụng trên 13 GPIO.
- Bộ điều khiển CAN 2.0 B C với trình điều khiển CANopen trên chip, tích hợp CAN transceiver.
- UART, 2 SPI & I2C (FM+)
- Hai bộ định thời16-bit; hai bộ định thời 32-bit cùng với PWM/Match/Capture và một bộ định thời hệ thống 24-bit.
- Bộ định thời nội 12MHz với sai số 1% trên 1 độ và 1 V.
- Power-On-Reset (POR); Multi-level Brown-Out-Detect (BOD); Bộ nhân tần PLL 10-50 MHz.
- Bộ chuyển đổi tương tự/số ADC 8 kênh với độ chính xác cao 10-bit ±1LSB DNL.
- 36 chân GPIO 5V, dòng lái cao (20 mA) trên mỗi chân.
- Khả năng bảo vệ phóng tĩnh điện cao: 8kV đối với Transceiver và 6.5kV đối với vi điều khiển.
- CAN transceiver phóng điện từ thấp (EME) và kháng nhiễu từ (EMI) cao.
Nguồn EETimes, 18/01/2011
Các chú thích thêm của người dịch:
- NXP là một công ty bán dẫn hàng đầu được thành lập bởi Philips hơn 50 năm trước.
- CAN (Controller Area Network): là bus mạng khu vực, đây là một chuẩn bus dùng trong các xe hơi được thiết kế cho phép các vi xử lý và các thiết bị (một nút mạng) thông tin với các nút mạng khác trong một cùng một xe hơi mà không cần máy chủ.
- CANopen: là một giao thức thông tin đặc tả thiết bị trong các hệ thống nhúng dùng trong tự động. CANopen thực thi một phần lớp mạng và các lớp trên lớp mạng.
- SiP (System-in Package): là một công nghệ tiên tiến giúp hợp nhất nhiều thành phần trong một chip đơn. Các thành phần kết hợp rất đa dạng như CPU, mạch lô-gic, mạch tương tự hoặc bộ nhớ từ đó giảm toàn bộ kích thước hệ thống.
- CAN transceiver: bộ chuyển đổi CAN thực thi lớp vật lý của giao thức CAN, thực hiện chuyển đổi tín hiệu số thành tín hiệu bus CAN và ngược lại.
- LQFP (Low-profile Quad Flat Package): là một dạng đóng gói mạch tích hợp, hình dẹp, xét trên một mặt phẳng thì các chân hướng ra ngoài chip (tính từ tâm chip) ở trên cả 4 cạnh chip. Các chân được đánh số theo chiều kim đồng hồ bắt đầu từ vị trí dấu chấm (ký kiệu đánh dấu chân số 1). Quy định về khoảng các giữa các chân có thể là 0.4, 0.5, 0.65 và 0.80 mm. LQFP48 là gói LQFP 48 chân.
- Phóng tĩnh điện (Electrostatic Discharge - ESD): là dòng điện tức thời xuất hiện đột ngột giữa hai thành phần có điện áp khác nhau. Trong lĩnh vực điện tử và công nghiệp thường quy định một mức giới hạn cho các dòng tức thời không mong muốn để tránh gây thiệt hại cho các thiết bị điện.
- Tương thích điện từ (Electromagnetic Compatibility - EMC): là khả năng của hệ thống hay thiết bị điện đã được kiểm tra ở các mức thiết kế, trong môi trường yêu cầu, mà không bị suy hao bởi các tương tác điện từ.
- Giao tiếp lập trình ứng dụng (Application Programming Interface - API): là những thiết lập theo quy định và đặc tả kỹ thuật để một chương trình phần mềm có thể truy cập và làm khả dụng các khả năng và tài nguyên được cung cấp bởi một chương trình phần mềm riêng khác cũng có API này. Nó là thành phần giao tiếp giữa các chương trình phần mềm khác nhau và thuận tiện cho việc tương tác với các chương trình này.
- ISP (In-System Programming): Lập trình trên hệ thống là khả năng của một số linh kiện lô-gic lập trình được, vi điều khiển và các chip khả trình khác có thể được lập trình trong khi đã được lắp đặt hoàn chỉnh trong hệ thống, điều này thuận tiện hơn so với các chip yêu cầu được lập trình trước khi gắn vào hệ thống.
- Từ điển đối tượng (The object dictionary): có bản chất là một nhóm các đối tượng có thể truy cập qua mạng được định nghĩa trước theo thứ tự. Mỗi đối tượng bên trong "từ điển" được định địa chỉ với một chỉ số chính 16 bit và một chỉ số phụ 8 bit.
- Kỹ thuật Thumb (Thumb technology): là một mở rộng của cấu trúc ARM 32 bit. Tập lệnh Thumb đặc tả một tập con của các lệnh ARM 32 bit thường dùng nhất được nén trong mã lệnh 16 bit. Mỗi lần xử lý, lệnh 16 bit được giải nén thành các lệnh ARM 32 bit trong thời gian thực mà không làm giảm hiệu suất.
Theo NguyenHung




Tin mới
-
 Điện áp là gì? Đơn vị và ký hiệu
Điện áp là gì? Đơn vị và ký hiệu
-
 IoT là gì? Mọi thứ về Internets of Things
IoT là gì? Mọi thứ về Internets of Things
-
 Công tắc từ là gì? Cấu tạo, nguyên lý, ứng dụng (2024)
Công tắc từ là gì? Cấu tạo, nguyên lý, ứng dụng (2024)
-
 Sử Dụng Cảm Biến Âm Thanh LM393 Với Arduino
Sử Dụng Cảm Biến Âm Thanh LM393 Với Arduino
-
 So sánh xung PPM và xung PWM
So sánh xung PPM và xung PWM
-
 KIT thí nghiệm AVR ATMEGA16A
KIT thí nghiệm AVR ATMEGA16A
-
 PL-2303HX Fix Lỗi Phased Out Since 2012
PL-2303HX Fix Lỗi Phased Out Since 2012
-
 Bộ Điều Khiển Nhiệt Độ Đóng Ngắt Relay XH-W1411
Bộ Điều Khiển Nhiệt Độ Đóng Ngắt Relay XH-W1411
-
 Phím tắt trong Altium Designer
Phím tắt trong Altium Designer
-
 Arduino UNO R4?
Arduino UNO R4?
